By Daphne Cornelisse
In this article, we will explore Convolutional Neural Networks (CNNs) and, on a high level, go through how they are inspired by the structure of the brain. If you want to read more about the brain specifically, there are more resources at the end of the article to help you further.
The Brain
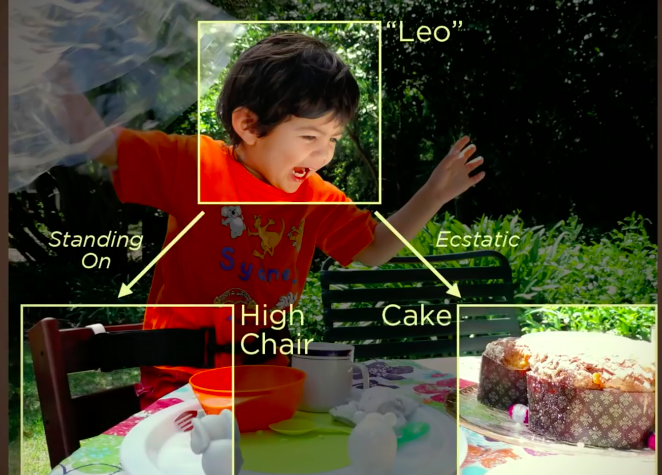
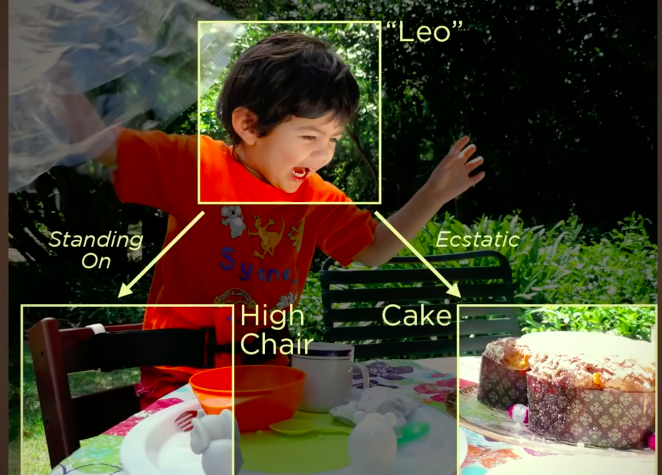
We are constantly analysing the world around us. Without conscious effort, we make predictions about everything we see, and act upon them. When we see something, we label every object based on what we have learned in the past. To illustrate this, look at this picture for a moment.

You probably thought something like “that’s a happy little boy standing on a chair”. Or maybe you thought he looks like he is screaming, about to attack this cake in front of him.
This is what we subconciously do all day. We see, label, make predictions, and recognize patterns. But how do we do that? How is it that we can interpret everything what we see?
It took nature over 500 million years to create a system to do this. The collaboration between the eyes and the brain, called the primary visual pathway, is the reason we can make sense of the world around us.
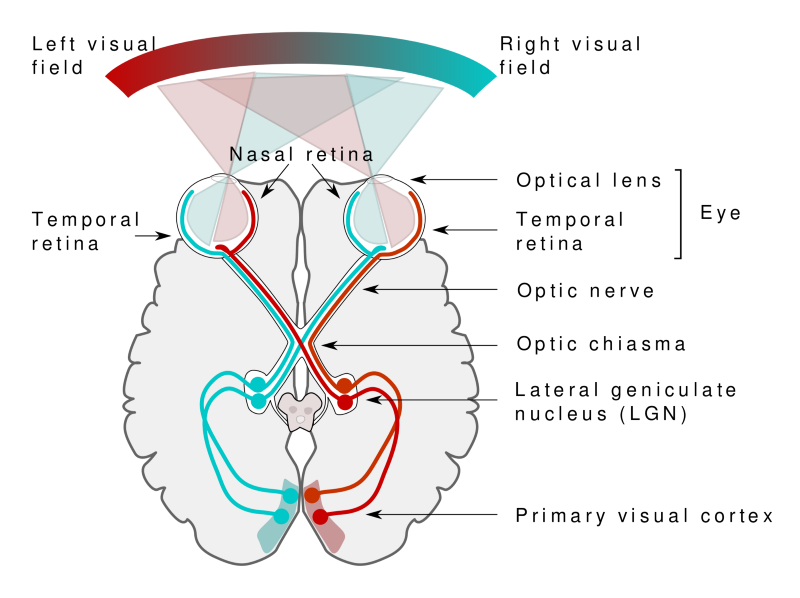
While vision starts in the eyes, the actual interpretation of what we see happens in the brain, in the primary visual cortex.
When you see an object, the light receptors in your eyes send signals via the optic nerve to the primary visual cortex, where the input is being processed. The primary visual cortex makes sense of what the eye sees.
All of this seems very natural to us. We barely even think about how special it is that we are able to recognise all the objects and people we see in our lives. The deeply complex hierarchical structure of neurons and connections in the brain play a major role in this process of remembering and labelling objects.
Think about how we learned what, for example, an umbrella is. Or a duck, lamp, candle, or book. In the beginning, our parents or family told us the name of the objects in our direct environment. We learned by examples that were given to us. Slowly but surely we started to recognise certain things more and more often in our environment. They became so common that the next time we saw them, we would instantly know what the name of this object was. They became part of our model on the world.
Convolutional Neural Networks
Similar to how a child learns to recognise objects, we need to show an algorithm millions of pictures before it is be able to generalize the input and make predictions for images it has never seen before.
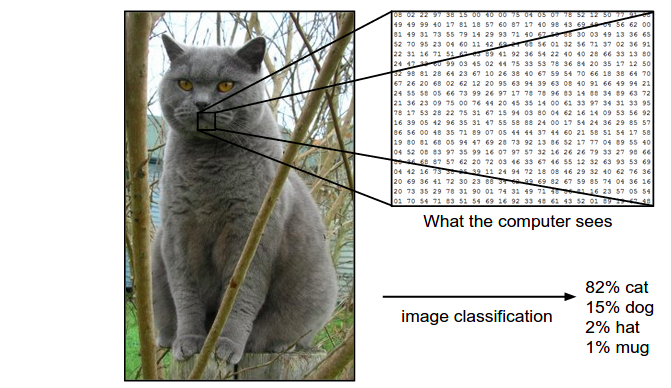
Computers ‘see’ in a different way than we do. Their world consists of only numbers. Every image can be represented as 2-dimensional arrays of numbers, known as pixels.
But the fact that they perceive images in a different way, doesn’t mean we can’t train them to recognize patterns, like we do. We just have to think of what an image is in a different way.
To teach an algorithm how to recognise objects in images, we use a specific type of Artificial Neural Network: a Convolutional Neural Network (CNN). Their name stems from one of the most important operations in the network: convolution.
Convolutional Neural Networks are inspired by the brain. Research in the 1950s and 1960s by D.H Hubel and T.N Wiesel on the brain of mammals suggested a new model for how mammals perceive the world visually. They showed that cat and monkey visual cortexes include neurons that exclusively respond to neurons in their direct environment.
In their paper, they described two basic types of visual neuron cells in the brain that each act in a different way: simple cells (S cells) and complex cells (C cells).
The simple cells activate, for example, when they identify basic shapes as lines in a fixed area and a specific angle. The complex cells have larger receptive fields and their output is not sensitive to the specific position in the field.
The complex cells continue to respond to a certain stimulus, even though its absolute position on the retina changes. Complex refers to more flexible, in this case.
In vision, a receptive field of a single sensory neuron is the specific region of the retina in which something will affect the firing of that neuron (that is, will active the neuron). Every sensory neuron cell has similar receptive fields, and their fields are overlying.

Further, the concept of hierarchy plays a significant role in the brain. Information is stored in sequences of patterns, in sequential order. The neocortex, which is the outermost layer of the brain, stores information hierarchically. It is stored in cortical columns, or uniformly organised groupings of neurons in the neocortex.
In 1980, a researcher called Fukushima proposed a hierarchical neural network model. He called it the neocognitron. This model was inspired by the concepts of the Simple and Complex cells. The neocognitron was able to recognise patterns by learning about the shapes of objects.
Later, in 1998, Convolutional Neural Networks were introduced in a paper by Bengio, Le Cun, Bottou and Haffner. Their first Convolutional Neural Network was called LeNet-5 and was able to classify digits from hand-written numbers.
For the entire history on Convolutional Neural Nets, you can go here.
Architecture
In the remainder of this article, I will take you through the architecture of a CNN and show you the Python implementation as well.
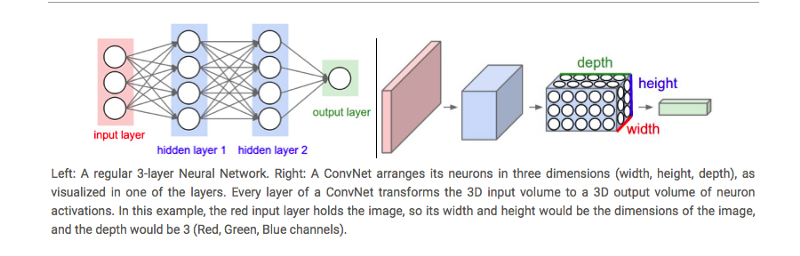
Convolutional Neural Networks have a different architecture than regular Neural Networks. Regular Neural Networks transform an input by putting it through a series of hidden layers. Every layer is made up of a set of neurons, where each layer is fully connected to all neurons in the layer before. Finally, there is a last fully-connected layer — the output layer — that represent the predictions.
Convolutional Neural Networks are a bit different. First of all, the layers are organised in 3 dimensions: width, height and depth. Further, the neurons in one layer do not connect to all the neurons in the next layer but only to a small region of it. Lastly, the final output will be reduced to a single vector of probability scores, organized along the depth dimension.
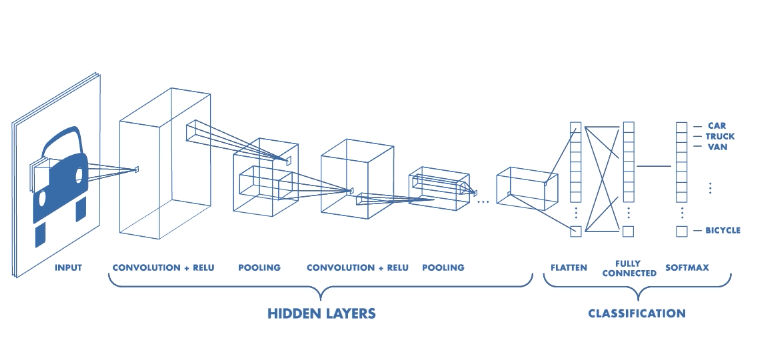
CNNs have two components:
- The Hidden layers/Feature extraction part
In this part, the network will perform a series of convolutions and pooling operations during which the features are detected. If you had a picture of a zebra, this is the part where the network would recognise its stripes, two ears, and four legs.
- The Classification part
Here, the fully connected layers will serve as a classifier on top of these extracted features. They will assign a probability for the object on the image being what the algorithm predicts it is.
# before we start building we import the libraries
import numpy as np
from keras.layers import Conv2D, Activation, MaxPool2D, Flatten, Densefrom keras.models import Sequential
Feature extraction
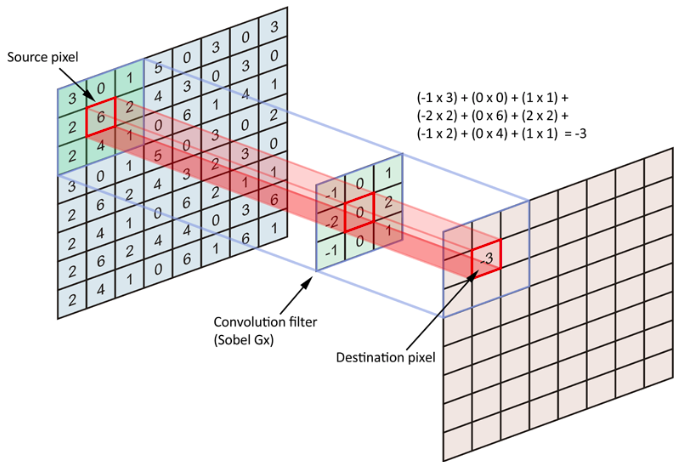
Convolution is one of the main building blocks of a CNN. The term convolution refers to the mathematical combination of two functions to produce a third function. It merges two sets of information.
In the case of a CNN, the convolution is performed on the input data with the use of a filter or kernel (these terms are used interchangeably) to then produce a feature map.
We execute a convolution by sliding the filter over the input. At every location, a matrix multiplication is performed and sums the result onto the feature map.
In the animation below, you can see the convolution operation. You can see the filter (the green square) is sliding over our input (the blue square) and the sum of the convolution goes into the feature map (the red square).
The area of our filter is also called the receptive field, named after the neuron cells! The size of this filter is 3x3.
For the sake of explaining, I have shown you the operation in 2D, but in reality convolutions are performed in 3D. Each image is namely represented as a 3D matrix with a dimension for width, height, and depth. Depth is a dimension because of the colours channels used in an image (RGB).
We perfom numerous convolutions on our input, where each operation uses a different filter. This results in different feature maps. In the end, we take all of these feature maps and put them together as the final output of the convolution layer.
Just like any other Neural Network, we use an activation function to make our output non-linear. In the case of a Convolutional Neural Network, the output of the convolution will be passed through the activation function. This could be the ReLU activation function.
Stride is the size of the step the convolution filter moves each time. A stride size is usually 1, meaning the filter slides pixel by pixel. By increasing the stride size, your filter is sliding over the input with a larger interval and thus has less overlap between the cells.
The animation below shows stride size 1 in action.
Because the size of the feature map is always smaller than the input, we have to do something to prevent our feature map from shrinking. This is where we use padding.
A layer of zero-value pixels is added to surround the input with zeros, so that our feature map will not shrink. In addition to keeping the spatial size constant after performing convolution, padding also improves performance and makes sure the kernel and stride size will fit in the input.
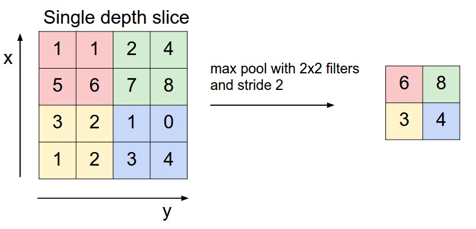
After a convolution layer, it is common to add a pooling layer in between CNN layers. The function of pooling is to continuously reduce the dimensionality to reduce the number of parameters and computation in the network. This shortens the training time and controls overfitting.
The most frequent type of pooling is max pooling, which takes the maximum value in each window. These window sizes need to be specified beforehand. This decreases the feature map size while at the same time keeping the significant information.
Thus when using a CNN, the four important hyperparameters we have to decide on are:
- the kernel size
- the filter count (that is, how many filters do we want to use)
- stride (how big are the steps of the filter)
- padding
# Images fed into this model are 512 x 512 pixels with 3 channels
img_shape = (28,28,1)
# Set up the model
model = Sequential()
# Add convolutional layer with 3, 3 by 3 filters and a stride size of 1# Set padding so that input size equals output size
model.add(Conv2D(6,2,input_shape=img_shape))
# Add relu activation to the layer
model.add(Activation('relu'))
#Pooling
model.add(MaxPool2D(2))
A nice way of visualizing a convolution layer is shown below. Try to look at it for a bit and really understand what is happening.
Classification
After the convolution and pooling layers, our classification part consists of a few fully connected layers. However, these fully connected layers can only accept 1 Dimensional data. To convert our 3D data to 1D, we use the function flatten in Python. This essentially arranges our 3D volume into a 1D vector.
The last layers of a Convolutional NN are fully connected layers. Neurons in a fully connected layer have full connections to all the activations in the previous layer. This part is in principle the same as a regular Neural Network.
#Fully connected layers
# Use Flatten to convert 3D data to 1Dmodel.add(Flatten())
# Add dense layer with 10 neuronsmodel.add(Dense(10))
# we use the softmax activation function for our last layermodel.add(Activation('softmax'))
# give an overview of our model
model.summary
_________________________________________________________________Layer (type) Output Shape Param # =================================================================conv2d_1 (Conv2D) (None, 27, 27, 6) 30 _________________________________________________________________activation_1 (Activation) (None, 27, 27, 6) 0 _________________________________________________________________max_pooling2d_1 (MaxPooling2 (None, 13, 13, 6) 0 _________________________________________________________________flatten_1 (Flatten) (None, 1014) 0 _________________________________________________________________dense_1 (Dense) (None, 10) 10150 _________________________________________________________________activation_2 (Activation) (None, 10) 0 =================================================================Total params: 10,180Trainable params: 10,180Non-trainable params: 0__________________________________________________________________
Training
Training a CNN works in the same way as a regular neural network, using backpropagration or gradient descent. However, here this is a bit more mathematically complex because of the convolution operations.
If you would like to read more about how regular neural nets work, you can read my previous article.
"""Before the training process, we have to put together a learning process in a particular form. It consists of 3 elements: an optimiser, a loss function and a metric."""
model.compile(loss='sparse_categorical_crossentropy', optimizer = 'adam', metrics=['acc'])
# dataset with handwritten digits to train the model onfrom keras.datasets import mnist
(x_train, y_train), (x_test, y_test) = mnist.load_data()
x_train = np.expand_dims(x_train,-1)
x_test = np.expand_dims(x_test,-1)
# Train the model, iterating on the data in batches of 32 samples# for 10 epochs
model.fit(x_train, y_train, batch_size=32, epochs=10, validation_data=(x_test,y_test)
# Training...
Train on 60000 samples, validate on 10000 samplesEpoch 1/1060000/60000 [==============================] - 10s 175us/step - loss: 4.0330 - acc: 0.7424 - val_loss: 3.5352 - val_acc: 0.7746Epoch 2/1060000/60000 [==============================] - 10s 169us/step - loss: 3.5208 - acc: 0.7746 - val_loss: 3.4403 - val_acc: 0.7794Epoch 3/1060000/60000 [==============================] - 11s 176us/step - loss: 2.4443 - acc: 0.8372 - val_loss: 1.9846 - val_acc: 0.8645Epoch 4/1060000/60000 [==============================] - 10s 173us/step - loss: 1.8943 - acc: 0.8691 - val_loss: 1.8478 - val_acc: 0.8713Epoch 5/1060000/60000 [==============================] - 10s 174us/step - loss: 1.7726 - acc: 0.8735 - val_loss: 1.7595 - val_acc: 0.8718Epoch 6/1060000/60000 [==============================] - 10s 174us/step - loss: 1.6943 - acc: 0.8765 - val_loss: 1.7150 - val_acc: 0.8745Epoch 7/1060000/60000 [==============================] - 10s 173us/step - loss: 1.6765 - acc: 0.8777 - val_loss: 1.7268 - val_acc: 0.8688Epoch 8/1060000/60000 [==============================] - 10s 173us/step - loss: 1.6676 - acc: 0.8799 - val_loss: 1.7110 - val_acc: 0.8749Epoch 9/1060000/60000 [==============================] - 10s 172us/step - loss: 1.4759 - acc: 0.8888 - val_loss: 0.1346 - val_acc: 0.9597Epoch 10/1060000/60000 [==============================] - 11s 177us/step - loss: 0.1026 - acc: 0.9681 - val_loss: 0.1144 - val_acc: 0.9693
Summary
In summary, CNNs are especially useful for image classification and recognition. They have two main parts: a feature extraction part and a classification part.
The main special technique in CNNs is convolution, where a filter slides over the input and merges the input value + the filter value on the feature map. In the end, our goal is to feed new images to our CNN so it can give a probability for the object it thinks it sees or describe an image with text.
You can find the entire code here.
More brain related recommendations?
- Read this really cool article on the brain and more.
- I also recommend this book on intelligence and the brain.
- “How to Create a Mind” by Ray Kurzweil.